CRV 2013
Joint conference information
CRV 2013 Invited SpeakersThis year we have four excellent speakers. Please see below for details. Date/Time: Wednesday, May 29th, 8:30-10:00 Session 1 Stefan Williams, University of Sydney
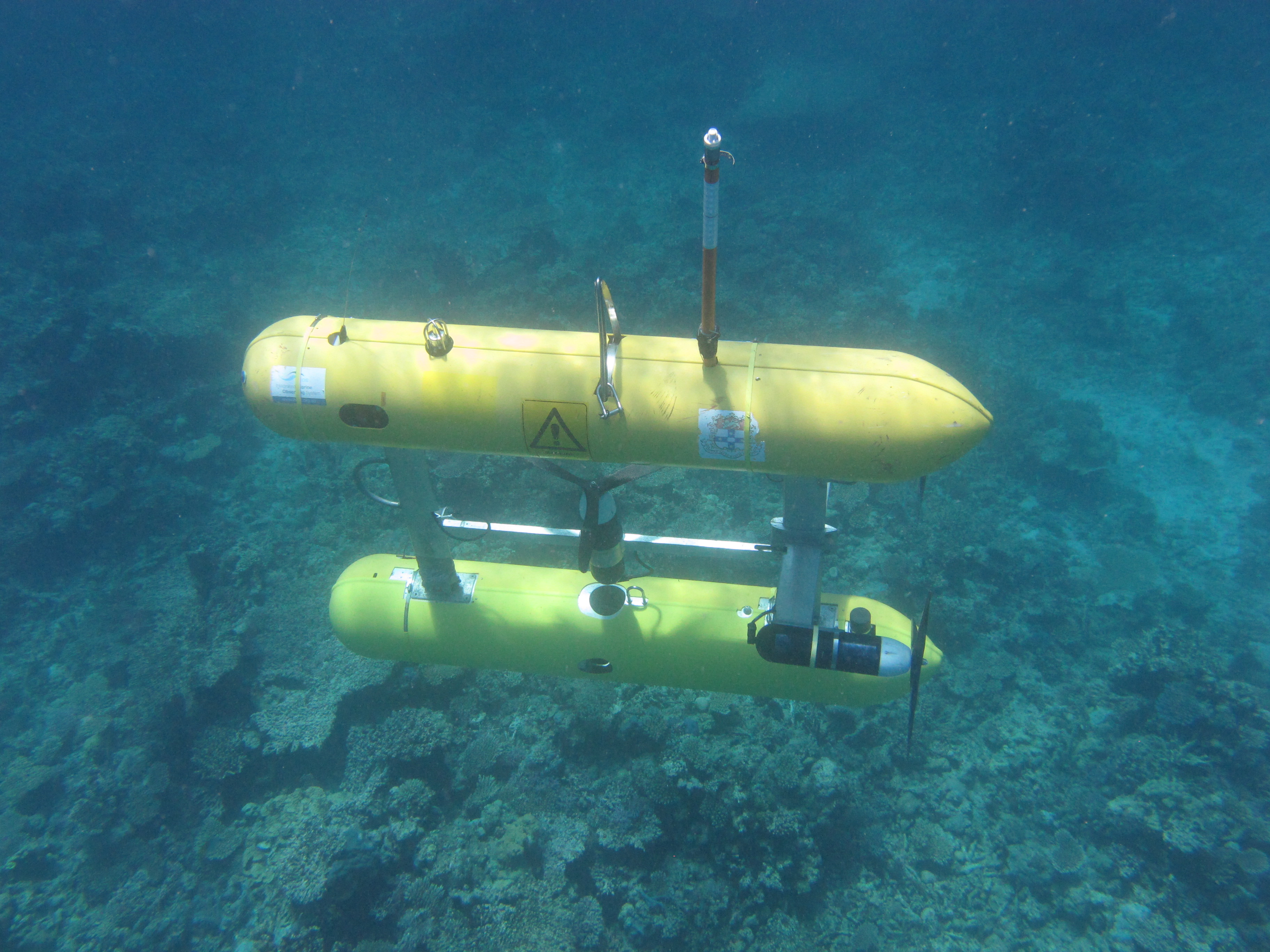
Abstract: AUVs for Environmental Monitoring: This talk will examine recent developments in marine imaging from Autonomous Underwater Vehicles (AUV), with a particular emphasis on novel imaging system design, visual navigation and mapping and clustering and classification of the resulting imagery. We provide a brief overview of Australia's Integrated Marine Observing System (IMOS) program that is facilitating the establishment of benthic reference sites around the country. These sites are revisited on an annual basis to monitor changes in marine habitats by exploiting developments in high resolution mapping using stereo imagery data collected by the AUV systems. We also briefly touch on recent challenges related to measuring change and transforming the resulting data into information suitable for the study of marine environments. We conclude with a few thoughts on the direction of future benthic observing programs and the potential role of long range AUV systems in cost-effectively improving our understanding of the oceans.
Date/Time: Wednesday, May 29th, 3:30-5:00 Session 4 Larry Matthies, NASA/Caltech Jet Propulsion Laboratory

Abstract: Autonomous Visual Navigation Systems for Flying Vehicles on Earth and in Space: Planetary exploration requires onboard vision systems for autonomous flying vehicles in several contexts. These include safe and precise landing on Mars, mapping and relative state estimation for low-altitude flight in close proximity to comets or asteroids, and navigating balloons in the atmosphere of Titan. On Earth, micro air vehicles need very closely related capabilities for onboard state estimation, obstacle avoidance, mapping, and landing site detection for a variety of applications, including indoor and outdoor reconnaissance and inspection. This talk will describe recent progress on vision-based state estimation, obstacle avoidance, and landing site detection for flying vehicles for Earth and space applications, as well as a brief update on the Curiosity rover on Mars.
Date/Time: Thursday, May 30th, 10:30-12:00 Session 6 Dieter Fox, University of Washington
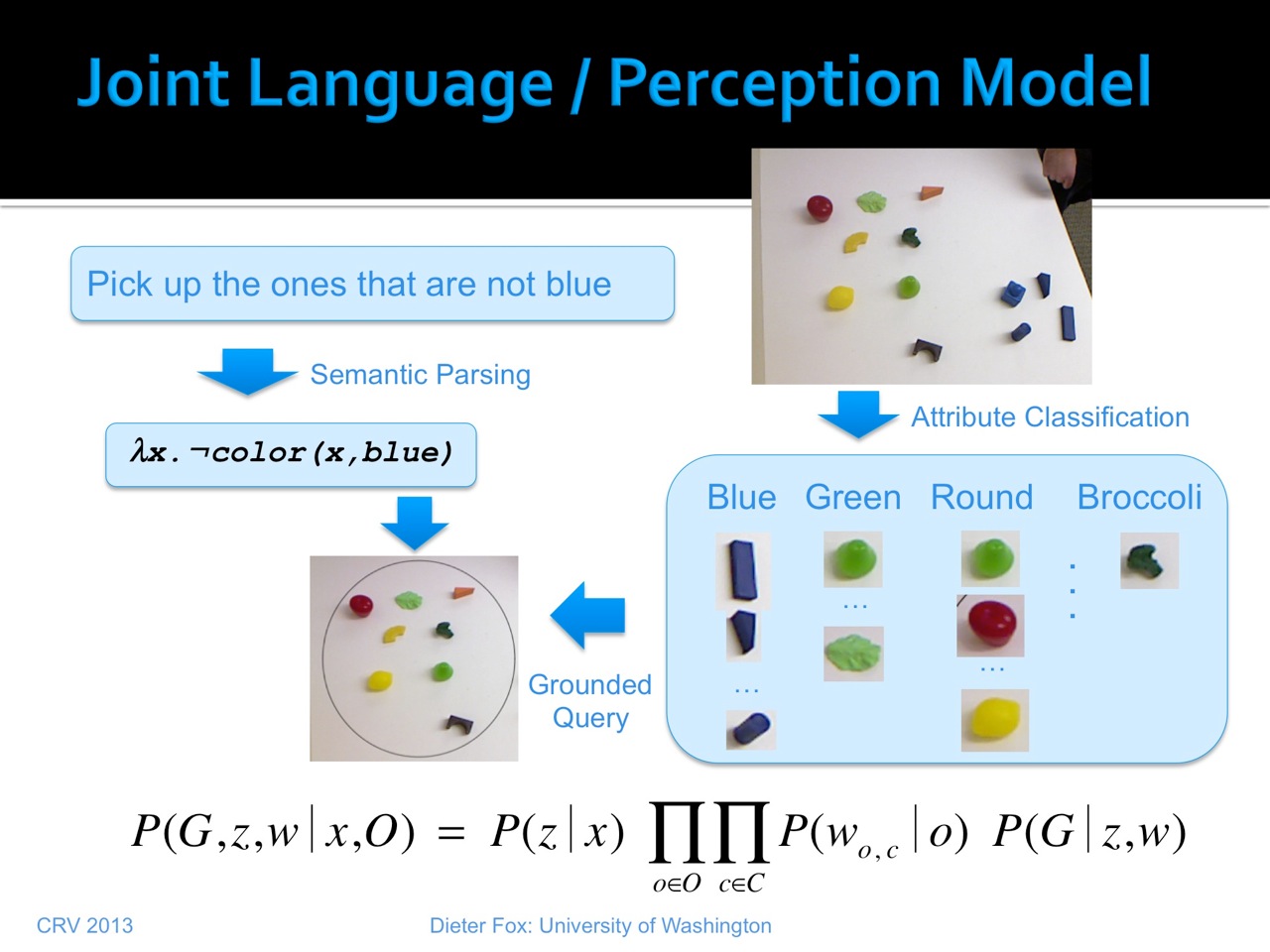
Abstract: Grounding Natural Language in Robot Control and Perception Systems:
Robots are becoming more and more capable at reasoning about people, objects,
and activities in their environments. The ability to extract high-level
semantic information from sensor data provides new opportunities for human robot
interaction. One such opportunity is to explore interacting with robots via
natural language. In this talk I will present our recent work toward enabling
robots to interpret, or ground, natural language commands in robot control
systems. We build on techniques developed by the semantic natural language
processing community on learning combinatory categorial grammars (CCGs) that
parse natural language input to logic-based semantic meaning. I will
demonstrate results in two application domains: First, learning to follow
natural language directions through indoor environments; and, second, learning
to ground object attributes via weakly supervised training.
Date/Time: Friday, May 31st, 8:30-10:00 Session 9 Wolfgang Heidrich, University of British Columbia
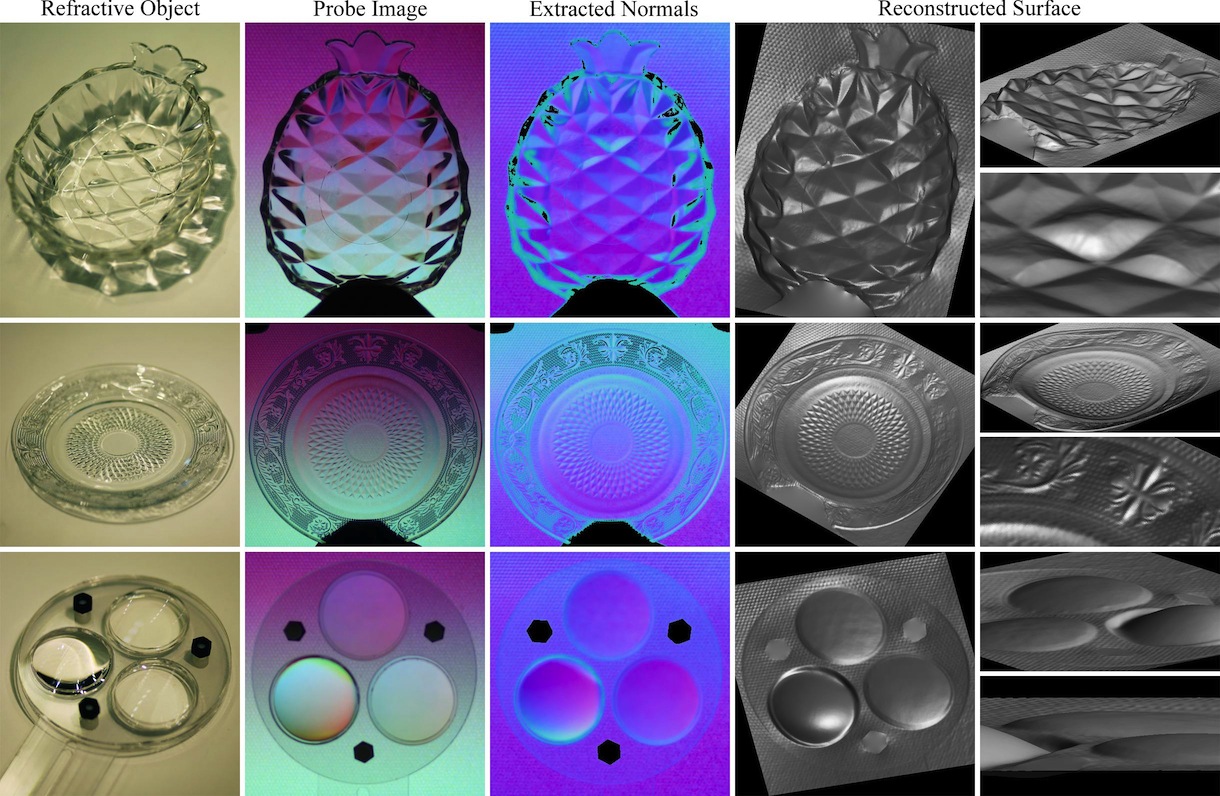
Abstract: Shape Reconstruction of Transparent Objects: While the 3D acquisition of opaque surfaces with Lambertian reflectance is a well-studied problem, transparent, refractive, specular and potentially dynamic scenes pose challenging problems for acquisition systems. In this talk I will discuss a range of computational photography approaches to acquire the shape of transparent solids, liquids, and gases, ranging from surface models of static solids to full volumetric reconstructions of gas flows.
| |||
|
| |||
|